Zoom Image
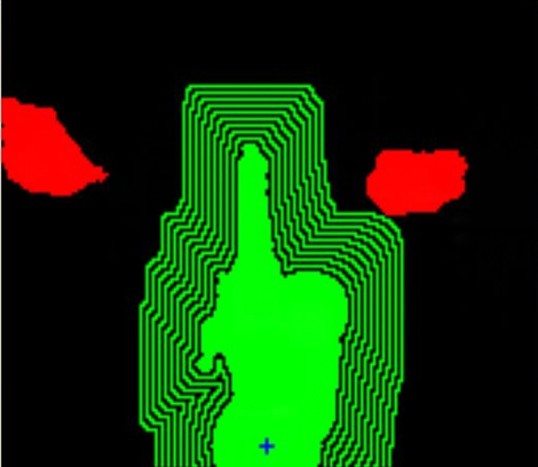
Visualization of a dynamic safety zone by a 3D camera
Source: IFA
Safe control systems are an essential element at a workplace involving collaborative robots. These systems are able to monitor all movements of the robot and to stop it immediately should it move with excessive velocity or to an inadmissible position. This requires the robot control to be able to detect, by means of safe sensors such as cameras or tactile sensors, where the operator is moving. The robot then does not approach the operator too closely, or avoids him or her. This enables workplaces to be created at which human operators are supported by robots. Despite these technical protective measures, a minor risk of collision remains.

Zoom Image
Prototype of an ultrasonic guard on the robot arm
Source: IFA
At the IFA, suitable new technologies for protective measures are tested on collaborative robots and evaluated, for example during research projects and students' degree theses:
-
A pilot implementation of a dynamic safety zone for robots was achieved with the aid of a non-safe Photonic Mixer
Device (PMD) 3D camera. For each camera pixel, this implementation determines the distance between the camera and
the observed objects, up to a distance of 7.5 m. This enables several persons to be detected and tracked.
-
A further project studied a solution involving ultrasonic sensors. These have already proved effective in safety
engineering. They have the advantage of reacting to any approach within the detection area and always signalling the
result of measurement in the form of the shortest distance to the detected object. The processing overhead for each
sensor is low, thereby enabling a larger number of sensors to be employed, guaranteeing seamless coverage.
-
In the EsIMiP project funded by the Bavarian Research Foundation (AZ 852 08), a concept was developed in
which the robot is "clothed" with outward-facing ultrasonic sensors. The concept resembles that of parking sensor
systems used in cars in which a small number of ultrasonic sensors are integrated into the car's bumper, although the
number of sensors used on the robot is greater. The video about the project EsIMiP can be found on the
homepage of the Technical University Munich. One project part, handled by the IFA, is presented in the video
'Teil 3'.
-
A 3D camera system enables the entire working space to be covered and can therefore be used for the planning of
evasive movements. At the same time, these movements can be monitored by the ultrasonic sensors for dangerous approach
movements. Once the ultrasonic sensors have detected an approach movement, downstream algorithms reduce the velocity of
the robot. This enables non-safety related, experimental algorithms to be used in the camera technology and path
planning; the operator remains safeguarded by the safety system consisting of ultrasonic sensors.
Besides the research topics described, the IFA conducts studies into the safety of camera systems and tests/certifies their safety, and is also involved in ongoing standardization activity (IEC 61496-4).

